Figura 3.12 Se utilizan dos relojes comparadores para determinar la posición relativa del eje móvil con respecto al eje fijo.

Figura 3.13 El dial de llanta se utiliza para medir Offset en un plano a lo largo de las longitudes de los ejes.

Figura 3.14 La esfera frontal mide la angularidad o inclinación entre los ejes.

Figura 3.15 Ejes desacoplados.

Figura 3.16 Ejes acoplados, esfera de llanta.

Figura 3.17 Ejes acoplados, esfera frontal

Figura 3.18 Fijaciones de montaje

Figura 3.20 Documentación de lecturas encontradas.

Figura 3.21 Medición de la desalineación vertical, a las 6 en punto.

Figura 3.22 Ajuste del valor de la flecha

Figura 3.23 Medición de la desalineación vertical, a las 12 en punto.

Figura 3.24 Ejemplo, lecturas TIR.


Figura 3.25 Medición de la desalineación horizontal

Figura 3.26 Medición de la desalineación horizontal, 9 en punto

Figura 3.27 Medición de la desalineación horizontal, a las 3 en punto.

Figura 3.28 Ejemplo, lecturas TIR horizontales.


Figura 3.29 Configuración y dimensiones

Figura 3.30 Ecuación, cálculo de los pies delanteros

Figura 3.31 Ecuación, cálculo de pies traseros

Figura 3.32 Cálculo de las patas delanteras. Los pies delanteros son 26 mils (0,66 mm) demasiado altos; es necesario retirar los calzos.
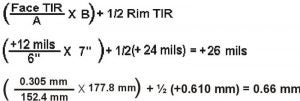
Figura 3.33 Cálculo de las patas traseras. Los pies traseros son 74,0 mils (1,88 mm) demasiado altos; es necesario retirar los calzos.

Figura 3.34 Configuración del gráfico.
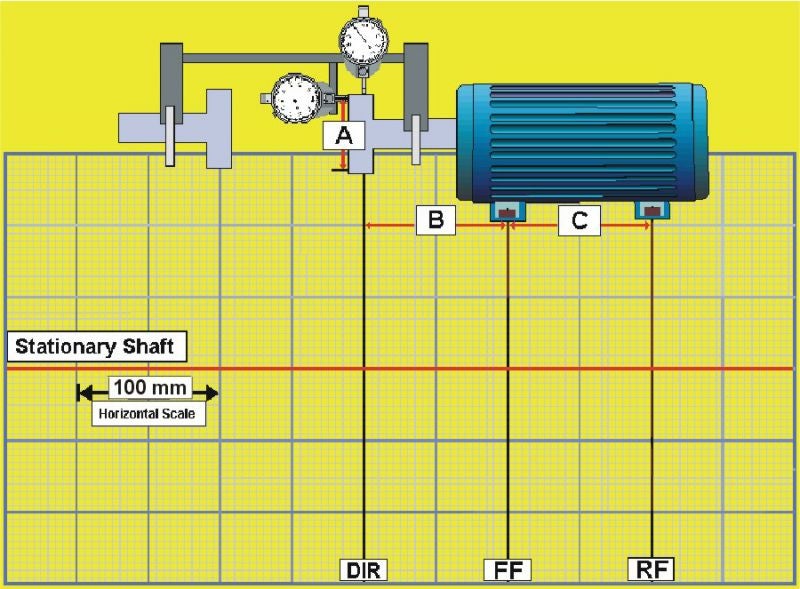
Figura 3.35 Trazado

Figura 3.36 Gráfico, posiciones de los pies.
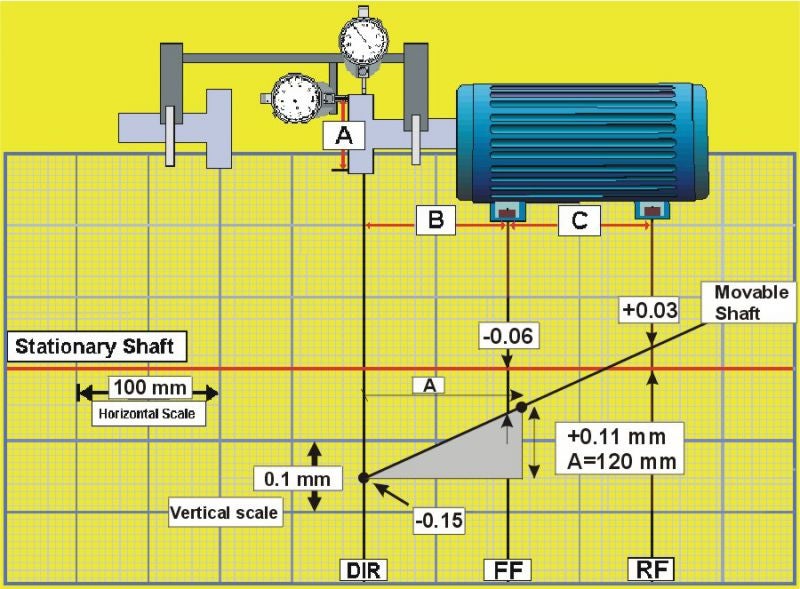
Figura 3.37 Realización de correcciones verticales
Figura 3.38 Correcciones horizontales. Reloj comparador en los pies.

Figura 3.39 Correcciones horizontales. Indicadores de cuadrante de control montados en el acoplamiento.