Figura 3.71 Princípio de Coning 1. O centro do círculo é o centro rotacional do eixo.
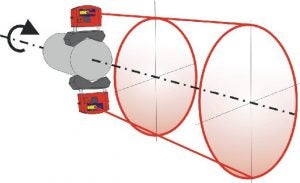
Figura 3.72 Princípio de Coning 2. O eixo de rotação é feito em um único ponto a uma distância da extremidade do eixo.
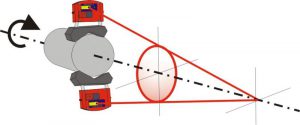
Figura 3.73 Método do indicador de discagem de marcha à ré. Medição de offset lateral estacionário, DIS.
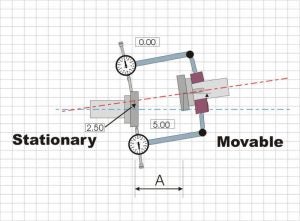
Figura 3.74 Método laser duplo. Medição de desvio lateral estacionário, TD-S
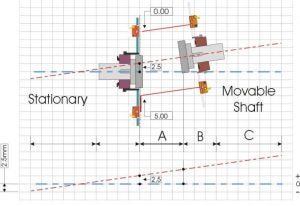
Figura 3.75 Método de inversão de marcha. Medição do deslocamento lateral móvel, DIM
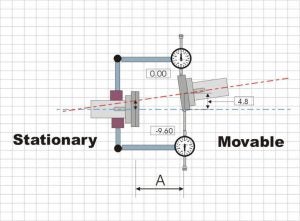
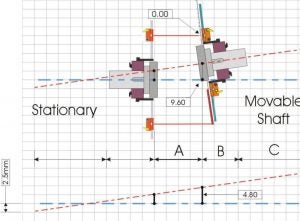
Figura 3.76 Método laser duplo. Medição do deslocamento lateral móvel, TD-M.
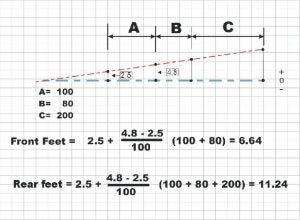
(tempo real)Figura 3.77 Equações
Figura 3.78 Exemplo, cálculo dos pés.